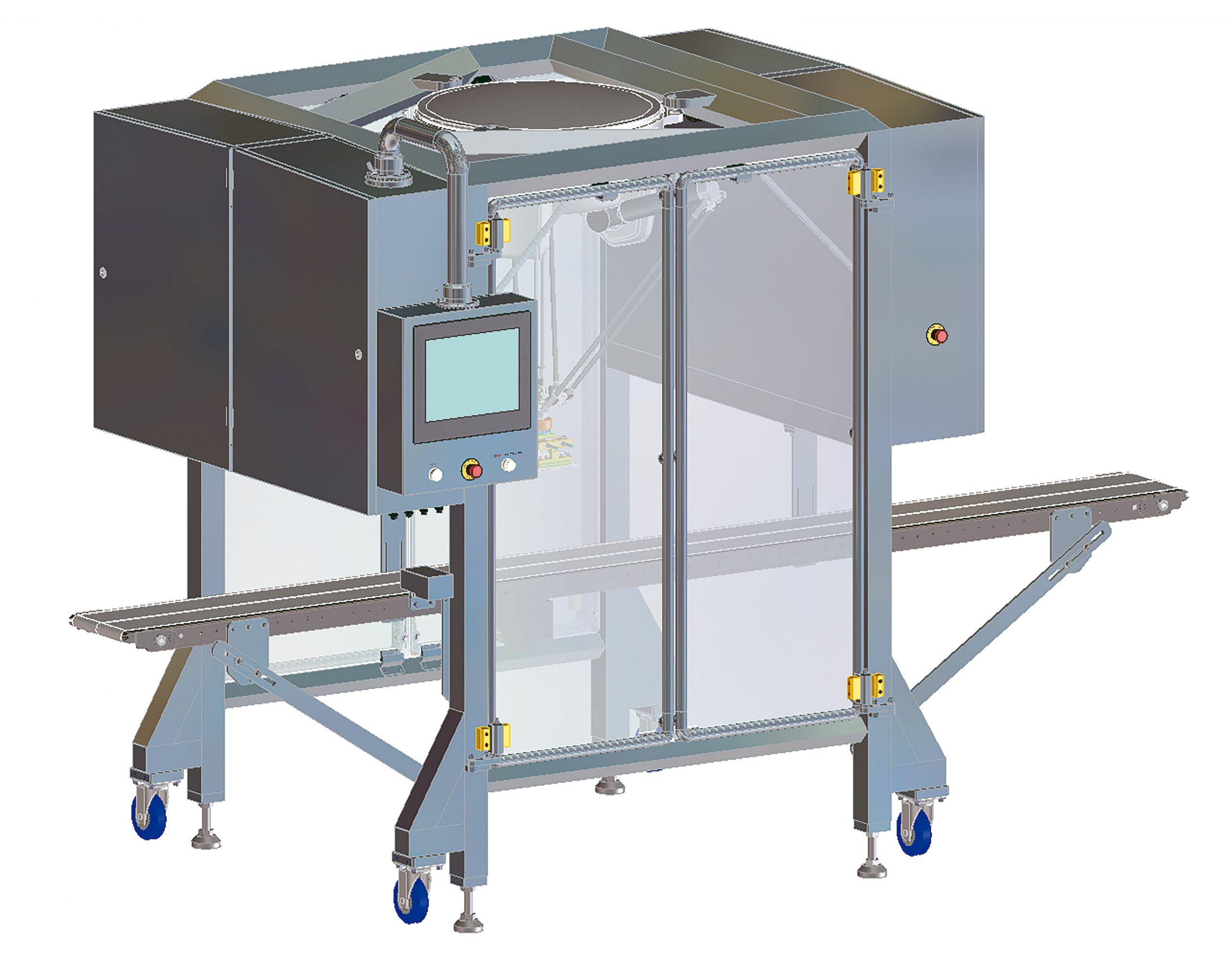
コンベア上を流れる製品を画像認識し、高速で整列させる装置。
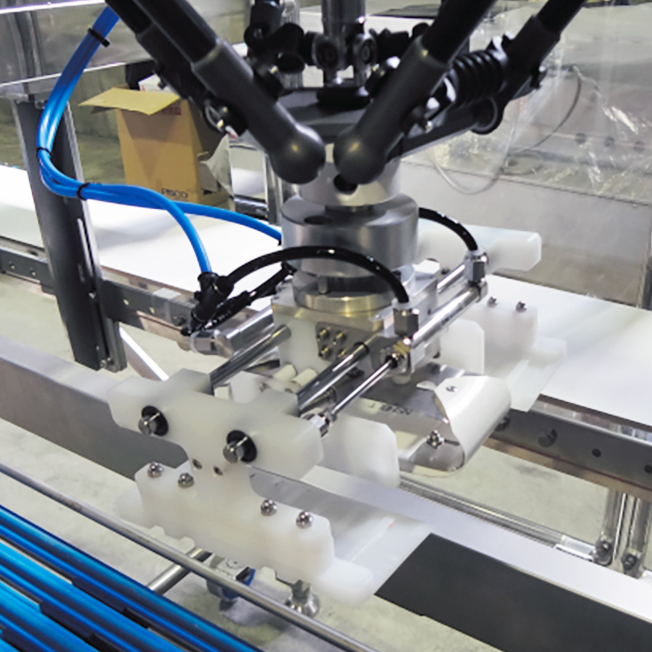
実際の装置
実際の装置(拡大)
パラレルリンクロボットと画像センサーを組合せ、高速判別、整列が可能。
設計ツール:Co Create Modeling(3D)エンジニアリング期間:3ヶ月サイズ:2020(W)x2300(H)x1660(L)制御方式:シーケンス(三菱電機)制御ネットワーク:Ethernet制御機器:パラレルリンクロボット、画像機器、その他
3D画像①
3D画像②